The development projects of the RERC ASSET will develop innovative assistive technology to improve functionality in stroke survivors.
D1: Development of an Environment-Aware Locomotion Mode Recognition System for Terrain Adaptation in Lower Limb Exoskeletons
He (Helen) Huang (PI), PhD., NC State/UNC-CH
Nitin Sharma (Co-PI), Ph.D., NC State/UNC-CH
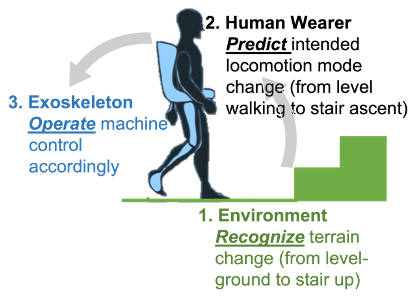
Overview: The goal of the D1 project is to develop an environment-aware locomotion mode recognition (LMR) system for lower limb exoskeleton control.
D2: Improving the Human-Machine Interface of a Hand Exoskeleton
Derek Kamper (PI), Ph.D., NC State/UNC-CH
Michael Daniele (Co-PI), Ph.D., NC State/UNC-CH
Mark Prochazka, MOT, UNC Health
Overview: The goal of this project is to improve the human-machine interface in the context of an assistive hand exoskeleton. The Bidirectional Cable Actuated (BAC)-Glove is capable of independently aiding movement and force generation in each digit but has limitations inherent to these type of devices. For this project we will redesign the mechanical interface between the hand and the exoskeleton to ease donning and doffing, fabricate novel EMG electrodes to improve EMG control, and create a smartphone app to facilitate communication between the device and user.

D3: Exoskeletal network for forearm supination
James Patton (PI), University of Illinois at Chicago and the Shirley Ryan AbilityLab
Derek Kamper (Co-PI), Ph.D., NC State/UNC-CH
Overview: The goal of this project is to establish a lightweight, portable adjustable network of springs to assist supination.
