The research projects of the RERC ASSET will investigate innovative engineering solutions to improve the function of assistive devices for stroke survivors.
R1: Learning to Achieve the Maximum Potential of Assistive Devices
Michael Lewek (PI), PT, Ph.D., UNC-CH
Gregory Sawicki (Co-I), Ph.D., Georgia Tech
Jason Franz (Co-I), Ph.D., UNC-CH/NC State
Overview: We will test the hypothesis that people recovering from stroke will achieve better gait speed and endurance through the promotion of enhanced limb propulsion, stability, and metabolic energy cost if they are ‘taught’ to adjust their paretic limb motion in a manner that most effectively transfers ankle EXO torque to forward progression. Here we will evaluate the critical interaction between assistive device torque and trailing limb position (Aim 1), determine the influence of trailing limb position feedback on limb propulsion (Aim 2), and ascertain the time course of learning to use an ankle exoskeleton (Aim 3).
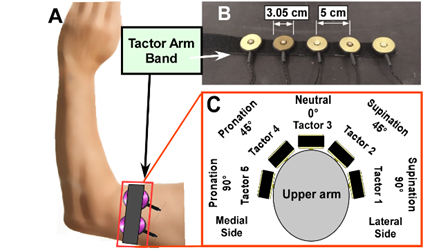
R2: Enhanced Somatosensory Feedback to Improve Control of Assistive Devices
Xiaogang Hu (PI), Ph.D., NC State/UNC-CH
Derek Kamper(Co-PI), Ph.D., NC State/UNC-CH
Overview: The goal of the R2 project is to determine whether externally enhanced somatosensory feedback (proprioceptive and tactile information), provided through electrical and vibratory skin stimulation, can improve the control of assistive devices targeting upper limb motor function. Our central hypothesis is that enhancing somatosensory feedback through external stimulation can improve sensory perception, thereby improving overall usability of assistive devices.
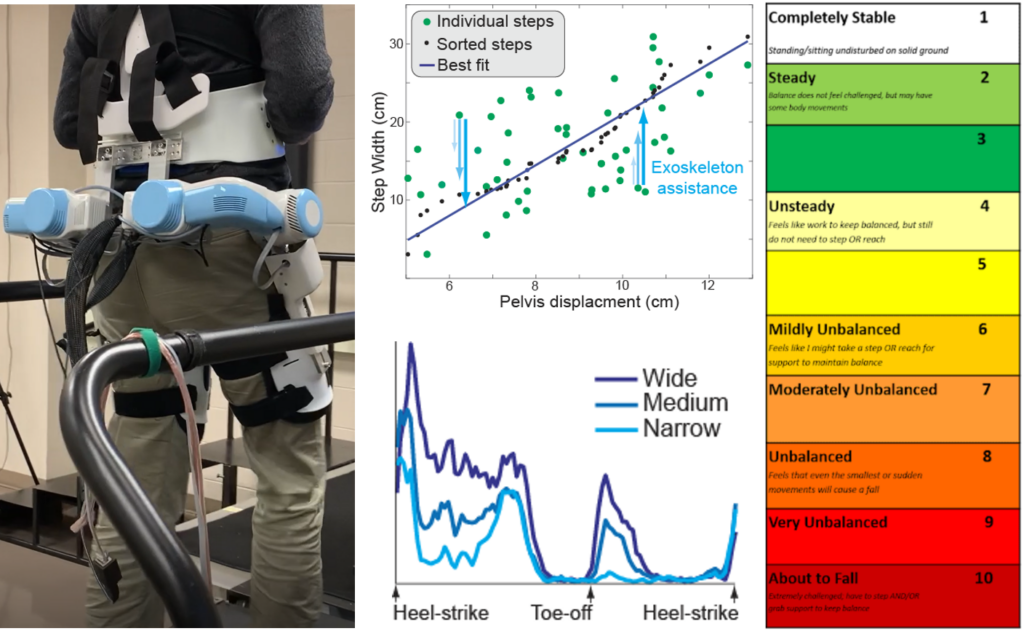
R3: Improving Mediolateral Walking Balance with an Assistive Exoskeleton
Jesse Dean (PI), Ph.D., MUSC
Overview: Assistive exoskeletons are a promising approach to improve post-stroke mobility, but have traditionally focused on device design rather than whether users are able and willing to accept the provided assistance. The objective of this project is to investigate the potential of a novel exoskeleton to improve post-stroke walking balance, while being accepted by users. Specifically, the exoskeleton will produce frontal plane hip torque based on the real-time motion of the user, assisting a foot placement strategy that is important for walking balance. We will assess the exoskeleton’s: 1) Mechanical effects, in terms of whether step width is effectively modulated based on pelvis motion; 2) Physiological effects, in terms of whether hip abductor activity is reduced or remains the same (indicating the user is not “fighting” the assistance); and 3) Psychological effects, in terms of the user’s perception of their walking balance. We will assess exoskeleton performance during both unperturbed and perturbed walking.